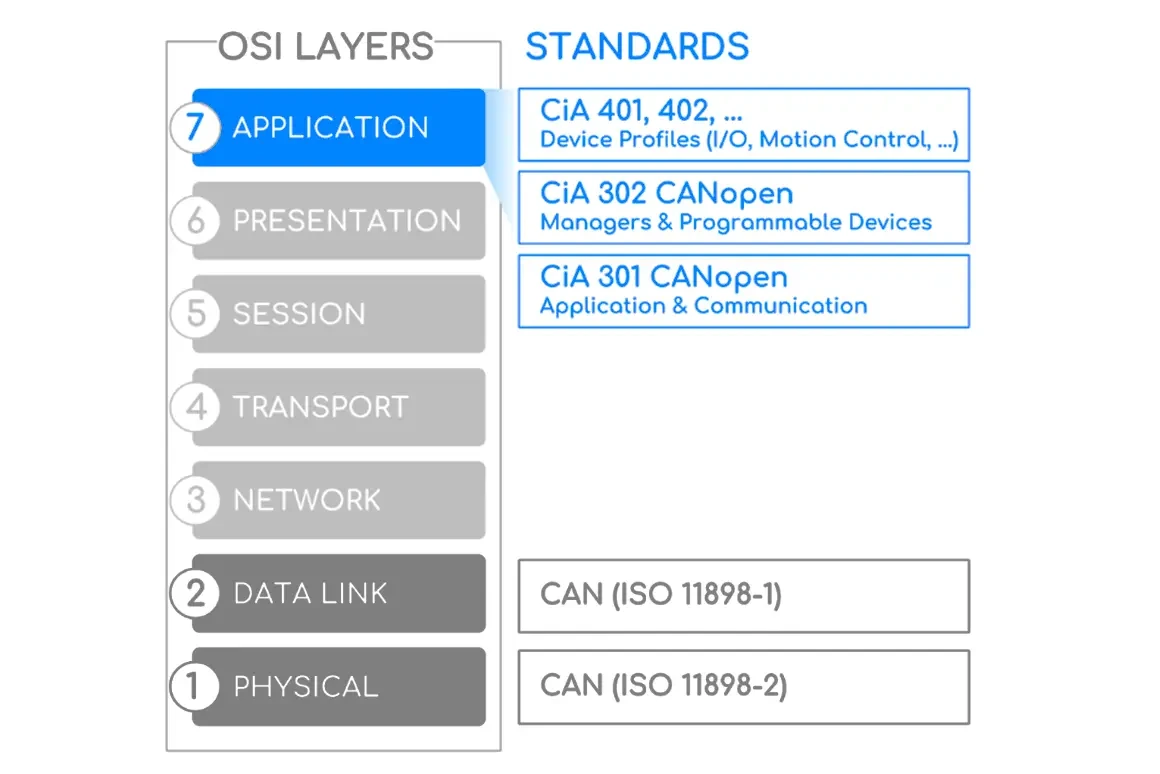
CAN (Controller Area Network) 통신의 표준은 주로 ISO 11898 시리즈에서 파생되어 다양한 부분에서 여러 표준이 정의되어 있는데 크게 CAN 트랜시버에 적용되는 물리계층 표준과 CAN 컨트롤러에 적용되는 데이터링크 계층 표준으로 나뉠 수 있다.
물리계층 표준:
- ISO 11898-2: 고속 CAN(CAN High-Speed)의 물리 계층을 정의한다. 차량 내 통신에서 주로 사용되며, 데이터 전송 속도는 최대 1 Mbps이다.
- ISO 11898-3: 저속 CAN(CAN Low-Speed)의 물리 계층을 정의한다. 주로 차량의 간단한 네트워크 및 저속 통신에 사용되며 Fault Tolerant(내고장성, 결함 허용) 특징을 가지고 있다.
데이터 링크 계층 표준:
- ISO 11898-1: CAN 데이터 링크 계층을 정의한다. CAN 프로토콜에서 데이터의 전송 및 오류 처리 기능 뿐만아니라 표준 CAN 메시지의 구조와 프레임의 형식을 규정한다.
이보다 상위에 존재하는 다양한 프로토콜로는 ISO-TP (ISO 15765-2), UDS, CANopen, EtherCAT, CCP, XCP 등이 있다.
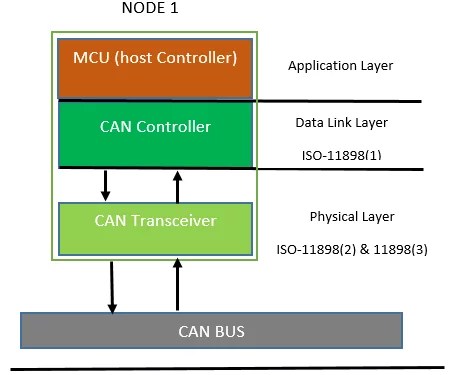
물리 계층의 표준은 CAN 트랜시버(Transceiver)와 관련이 있으며, 트랜시버는 물리적인 신호를 변환하고 송수신하는 역할을 합니다.
그리고 데이터 링크 계층의 표준은 주로 CAN 컨트롤러(Controller)와 관련이 있으며, CAN 컨트롤러는 데이터의 전송, 수신, 및 프로토콜 관리 등을 담당한다. 따라서 데이터 링크 계층의 표준인 ISO 11898-1에서도 CAN 컨트롤러에서 구현되는 프로토콜의 세부 사항과 동작을 규정하고 있다.
'임베디드 개발 > 펌웨어' 카테고리의 다른 글
| USB 2.0 pin out + ID핀 역할 (0) | 2024.03.16 |
|---|---|
| 1번 핀 찾는 법 (0) | 2024.02.24 |
| Ethernet 물리 계층의 표준 (0) | 2024.01.08 |
| ARINC 429 waveform (0) | 2024.01.01 |
| RS-422, RS-485 Waveform (0) | 2023.11.24 |


