


sin, cos, tan 그래프를 10ms 마다 그리는 예제파일
다이얼로그의 Picture Control을 아이디 IDC_STATIC_RT_GRAPH 로 추가하고 위치와 크기를 맞춘다.
다이얼로그의 -Dlg.h 파일에서 OScopeCtrl.h 파일을 include 하고 COScopeCtrl 컨트롤의 객체 포인터 _rtGraph를 선언해 둔다.
// COScopeCtrl의 헤더 파일 인클루드
#include "OScopeCtrl.h"
...
class *Dlg : public CDialog
{
...
// COScopeCtrl 컨트롤의 객체 포인터를 선언
COScopeCtrl *_rtGraph;
...
};
onInitDialog() 함수에서는 IDC_STATIC_RT_GRAPH 컨트롤의 위치와 크기를 얻어와서 그 위치에 오실로스코프 컨트롤을 생성한다.
그리고 x, y 축의 타이틀, 각 그래프의 레이블과 색상을 설정한다.
onInitDialog() 함수의 마지막에서는 타이머 이벤트를 가동하여 주기적으로 그래프가 업데이트 되도록 한다.
BOOL *Dlg::OnInitDialog()
{
...
// 오실로스코프 컨트롤이 위치할 영역 가져오기
CRect rtGraph;
GetDlgItem(IDC_STATIC_RT_GRAPH)->GetWindowRect(rtGraph);
ScreenToClient(rtGraph);
// 오실로스코프 컨트롤을 생성하고 설정한다.
_rtGraph = new COScopeCtrl(3); //cos,sin,tan 3개의 그래프 예약
_rtGraph->Create(WS_VISIBLE | WS_CHILD, rtGraph, this, IDC_STATIC_RT_GRAPH);
_rtGraph->SetRanges(-3., 3.);
_rtGraph->autofitYscale = true;
_rtGraph->SetYUnits("Value");
_rtGraph->SetXUnits("Time");
_rtGraph->SetLegendLabel("cos(t)", 0);
_rtGraph->SetLegendLabel("sin(t)", 1);
_rtGraph->SetLegendLabel("tan(t)", 2);
_rtGraph->SetPlotColor(RGB(255,0,0), 0);
_rtGraph->SetPlotColor(RGB(0,255,0), 1);
_rtGraph->SetPlotColor(RGB(0,0,255), 2);
_rtGraph->InvalidateCtrl();
// 오실로스코프 컨트롤을 그리기 위한 타이머 이벤트 활성화
SetTimer (1000, 10, NULL);
...
}
-Dlg.cpp 파일에서 WM_TIMER 이벤트와 WM_DESTROY 이벤트를 수행할 함수를 만들고 다음과 같이 소스코드를 추가한다.
void *Dlg::OnTimer(UINT_PTR nIDEvent)
{
if(nIDEvent==1000) {
double t = (double)GetTickCount()/1000.;
double value[3] = {cos(t), sin(t), tan(t) };
_rtGraph->AppendPoints(value);
}
CDialog::OnTimer(nIDEvent);
}
void *Dlg::OnDestroy()
{
CDialog::OnDestroy();
// 오실로스코프 컨트롤 삭제
delete _rtGraph;
}출처 : https://blog.daum.net/pg365/126
C++에서 실시간 그래프 그리기: 오실로스코프(oscilloscope) 컨트롤
C++로 로봇 프로그램을 하다보면 센서에서 실시간으로 들어오는 데이터를 연속적으로 모니터링 할 필요가 있습니다. 이때 유용한 컨트롤이 OscopeCtrl 입니다. OscopeCtrl은 오실로스코프(oscilloscope)
blog.daum.net
타이머 ID가 1000인 경우 value를 배열에 담아 _rtGrapth->AppendPoints 인수로 넘기고 있다.
참고로 GetTickCount() 함수는 #include <windows.h> 하여 사용할 수 있고, 시스템이 시작한 시점 즉 컴퓨터를 부팅한 시점부터 이 함수를 호출한 시점까지 흘러간 시간을 밀리초 단위로 반환하는 함수이다. 다만 GetTickCount() 는 DWORD(32비트)라서 49.7일이 지나는 시점에 오버플로우가 난다. 이 대안으로 64비트 크기를 사용하는 GetTickCount64() 함수를 쓰는것이 더 안전하다.
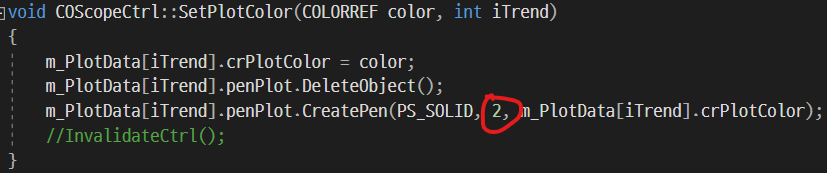
그래프의 선 굵기를 굵게하거나 얇게 하려면 아래부분을 조정해주면 된다. 디폴트는 0값이다.
'프로그래밍 > MFC (C++)' 카테고리의 다른 글
| MFC ] 윈도우 크기 조절 또는 고정하기, 최소/최대 사이즈 지정 (0) | 2022.08.28 |
|---|---|
| MFC ] 시리얼 통신으로 LED 제어하기 (3) + MySQL (IoT) (0) | 2022.07.17 |
| MFC ] 다이얼로그 종료시 함수 호출 순서 OnClose, OnDestory, PostNcDestroy (0) | 2022.07.15 |
| MFC ] CString 문자열 파싱하는 여러 방법 (0) | 2022.07.14 |
| MFC ] 리스트 컨트롤 제일 하단으로 내리는 법 (0) | 2022.07.14 |



